



���ܙC����WIFIͨ�ų��ݽ�Q����
���ܙC����WIFIͨ�ų��ݽ�Q����
�˹��ɱ����ӣ��C����Խ��Խ���V�������ڸ����������C���˳��ݴ��������}��
1���C��������ԄӺ��ݣ�����ݺ��е���ǰ�njӣ�
2���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
3����ݵ��˙C��������Д��_�T�����_��λ�ˣ����������P�T��
4���C����Ҫȥ8�ǣ��Y��6�������£��C������ô�Д�˕r���ܳ���ݣ�
5���M����ݺ�����ô�x��njӣ��������nj�ȥ��
��2����;�����ͣ�����_�T��ϵ�y����ǰ���ͣ���njӔ����r�l�ͽo�C���ˣ�����C������ǰ����ݡ�
��2������ݵ��_��ǰ�njӣ�ϵ�y�Ԅӌ���ǰ����\��B�����С����С��T���_�������P�T����Ϣ�l�ͽo�C���ˣ��Ա�C�������x�����_����M�롣
�C�����^����ͨ���l
�C�����^�l�C�����_�l�C߅�ϣ��o�������l�C����ϵ�y�l���_�lָ��l�C�ԄӴ��_��
�C�����_�T
�C�����_�T�����_ƽ���T�ڣ��o�������T��ϵ�y�l���_�Tָ�ƽ���T�ԄӴ��_��
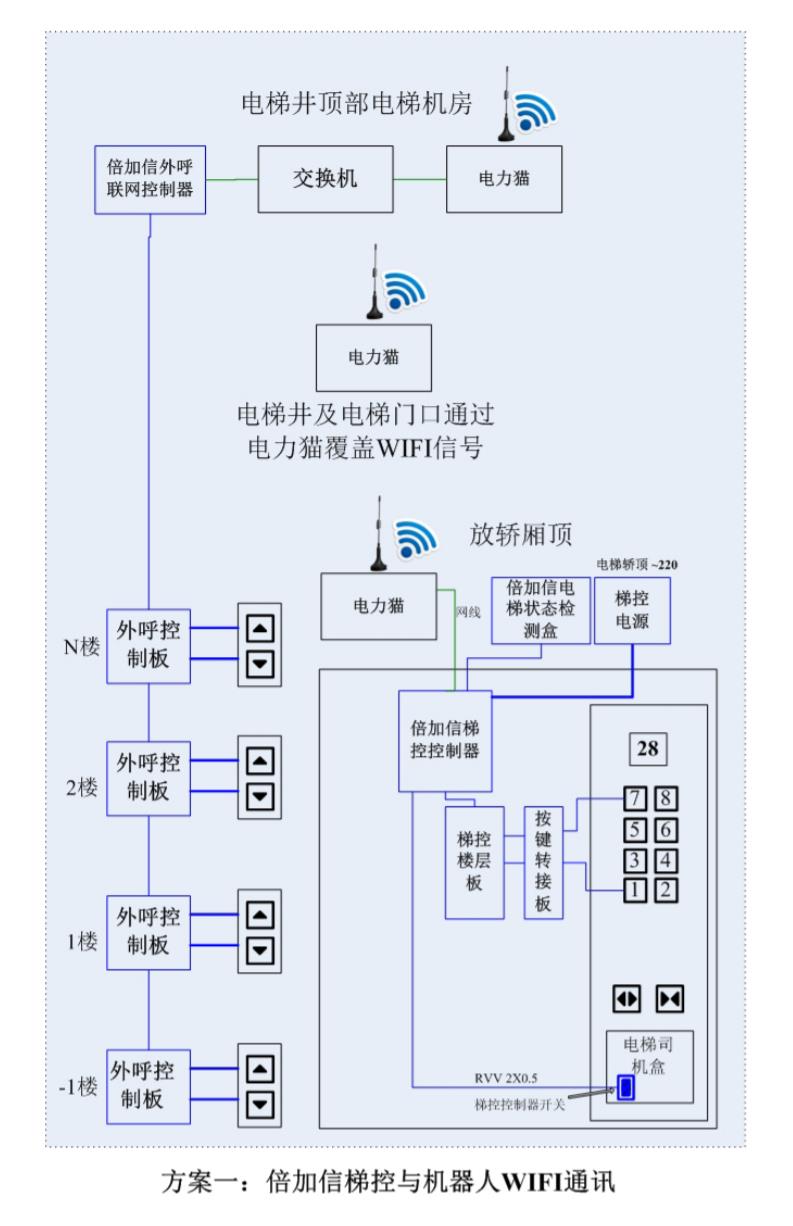 ����WIFI���������f��
����WIFI���������f��
��1�� �C���˵�����T�ڸ������l���������(0x1211)ָ��������ݿ�ϵ�y�����C���˰l��ָ������c����ǰ�nj��ϰ��I�����°��I��
��2�� �C�����_ʼ�l���x����\�Р�B(0x0024)ָ����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
��3�� �C�����M������^�̿��Գ��m�l�̓Ⱥ��c���njӰ��I(0x120A)ָ���c���_�T���o�����hÿ��һ�Σ�ֱ���C������ȫ�M����ݞ�ֹ��
��4�� �C������ȫ�M����ݺl�̓Ⱥ��c���njӰ��I(0x120A)ָ���c��Ҫȥ�ĘnjӰ��I���l���ꮅ�ȴ�����Ԅ��P�T�������h�C���˰l�P�Tָ���Щ��ݛ]�з��A���ܿ��ܕ����F�A����r��
��5�� �C�����_ʼ�l���x����\�Р�B(0x0024)ָ����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
�˹��ɱ����ӣ��C����Խ��Խ���V�������ڸ����������C���˳��ݴ��������}��
1���C��������ԄӺ��ݣ�����ݺ��е���ǰ�njӣ�
2���C����Ҫ�Ϙǣ��քe���к����е����҃ɲ����ͬ�r���_���C��������x�����_������M�룿
3����ݵ��˙C��������Д��_�T�����_��λ�ˣ����������P�T��
4���C����Ҫȥ8�ǣ��Y��6�������£��C������ô�Д�˕r���ܳ���ݣ�
5���M����ݺ�����ô�x��njӣ��������nj�ȥ��
�C��������x�ӣ�

��2����;�����ͣ�����_�T��ϵ�y����ǰ���ͣ���njӔ����r�l�ͽo�C���ˣ�����C������ǰ����ݡ�
�C������ݺ��ݣ�

��2������ݵ��_��ǰ�njӣ�ϵ�y�Ԅӌ���ǰ����\��B�����С����С��T���_�������P�T����Ϣ�l�ͽo�C���ˣ��Ա�C�������x�����_����M�롣
�C�����^����ͨ���l
�C�����^�l�C�����_�l�C߅�ϣ��o�������l�C����ϵ�y�l���_�lָ��l�C�ԄӴ��_��
�C�����_�T
�C�����_�T�����_ƽ���T�ڣ��o�������T��ϵ�y�l���_�Tָ�ƽ���T�ԄӴ��_��
��1�� �C���˵�����T�ڸ������l���������(0x1211)ָ��������ݿ�ϵ�y�����C���˰l��ָ������c����ǰ�nj��ϰ��I�����°��I��
��2�� �C�����_ʼ�l���x����\�Р�B(0x0024)ָ����hÿ��@ȡһ�Σ��Д��\�з���ǰ�njӡ��_�T��B�����\�з����ǙC����Ҫȥ�ķ������С����У���ͣ���nj��ǙC���ˮ�ǰ�njӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ�M����ݣ�
��3�� �C�����M������^�̿��Գ��m�l�̓Ⱥ��c���njӰ��I(0x120A)ָ���c���_�T���o�����hÿ��һ�Σ�ֱ���C������ȫ�M����ݞ�ֹ��
��4�� �C������ȫ�M����ݺl�̓Ⱥ��c���njӰ��I(0x120A)ָ���c��Ҫȥ�ĘnjӰ��I���l���ꮅ�ȴ�����Ԅ��P�T�������h�C���˰l�P�Tָ���Щ��ݛ]�з��A���ܿ��ܕ����F�A����r��
��5�� �C�����_ʼ�l���x����\�Р�B(0x0024)ָ����hÿ��@ȡһ�Σ��Дஔǰ�njӡ��_�T��B����ͣ���nj��ǙC����Ҫȥ�Ęnjӣ����T�_��λ�ˣ��C���˾Ϳ����_ʼ����ݣ�
��6�� �C���˳�����^�̿��Գ��m�l�̓Ⱥ��c���njӰ��I(0x120A)ָ���c���_�T���o��ÿ��һ�Σ�ֱ���C������ȫ����ݞ�ֹ��
�������Ƽ����ЙC�����{�����ݡ��C����LoRa�������C����Zigbee�������C����2.4G�������C����433M�������C�����Z�����ݡ��C����4G���ݡ��C����5G���ݵȳ��ݽ�Q������
- ��һƪ�����ܙC�����{��ͨӍ���ݽ�Q���� 2021/6/8
- ��һƪ�����ܙC���˳��ݽ�Q���� 2021/6/8