



��B�C���˳��ݵ�늿ؼ��g����
�C���˳��ݵ�늿ؼ��g
�ڙC���˳��ݵČ��F�^���У�늙C���������dz���Ҫ�����á�늙C������ָͨ�^����늙C�������늉��팍�F늙C���D�ӡ�늙C�Ŀ��Ʒ�ʽ��Ҫ��ֱ��늙C���ƺͽ���늙C���ơ��ڙC���˳��ݵČ��F�У�һ����ý���늙C���ơ�
����늙C����֮�⣬�C���˳���߀��Ҫ��ӿ���ϵ�y��֧�֡���ӿ���ϵ�y��Ҫ������ӿ������Ϳ���ܛ���ɲ��֡�
�ڙC���˳����У������������������P��Ҫ�����á��C���˳�����Ҫͨ�^�����������h���M�и�֪�͙z�y�������r�{�����\�Ӡ�B���Ԍ��F��ȫ�\�С��C���˳�����Ҫ���ü����������ҕ�X�������ͳ����������ȡ�
���������������������ǙC���˳���������Ҫ�Ă�����֮һ���������������ͨ�^�l�伤���y���C�����c�������w֮�g�ľ��x���C���˳��ݿ���ͨ�^�������������֪���֮�g�ľ��x�߶ȵ���Ϣ������늙C�������l����̖�����ƙC���˵��\�Ӡ�B��
ҕ�X��������ҕ�X��������ͨ�^���h���еĈD���M�з��������_���C���˵�λ�úͷ��C���˳��ݿ���ͨ�^ҕ�X����������֪�����߅�ĉ��ڵ���Ϣ����Ӌ����C�����\�Ӡ�B��׃�����Ķ��������\�Ӡ�B��
�����������������������ǙC���˳��������ڙz�y���w���x��һ�N���������������������Ԝy�����w�c�C����֮�g�ľ��x���Ķ��_���C���˵�λ�úͷ��C���˳��ݿ���ͨ�^��������������֪�����ݺͰ���֮�g�ľ��x����Ϣ��������ӿ������l����������̖���Ķ��{���C���˵��\�Ӡ�B��
��֮���C���˳��ݵ�늿ؼ��g��һ�N�dz����M�ļ��g��ͨ�^늙C���ơ���ӿ���ϵ�y�����������Ƶ��ֶ팍�F���ڌ��F�C���˳��ݵ��^���У��҂���Ҫ��늙C���ơ���ӿ���ϵ�y�͂����������M��Ԕ���ķ������о���ֻ���@�ӣ����ܰl�]�C���˳��ݼ��g����ݣ����F��Ч����ȫ�ij����\ݔ��
���Ę˺�����B�C���˳��ݵ�늿ؼ��g����
<
�C������һ���܉������_չ��ӣ��M��̽���������ͽ���������ϵ�y���F�ڣ��C�������ڱ��V�������ڸ��N��ͬ���I������֮һ���dz��ݡ��C���˳��ݼ��g��һ�N���M�ļ��g��ͨ�^늙C���ơ���ӿ���ϵ�y�����������Ƶ��ֶ팍�F�����Č����C���˳��ݵ�늿ؼ��g�M�н�B��
�ڙC���˳��ݵČ��F�^���У�늙C���������dz���Ҫ�����á�늙C������ָͨ�^����늙C�������늉��팍�F늙C���D�ӡ�늙C�Ŀ��Ʒ�ʽ��Ҫ��ֱ��늙C���ƺͽ���늙C���ơ��ڙC���˳��ݵČ��F�У�һ����ý���늙C���ơ�
�ڙC���˳��ݵ�늙C�����У���Ҫ��늙C�M���ٶȺͷ���Ŀ��ơ�늙C���ƣ���Ҫ�����D�ٿ��ơ�λ�ÿ��ƺ����ؿ������N���D�ٿ�����ָͨ�^����늙C���D�ف팍�F���C���˵��\�ӿ��ơ�λ�ÿ�����ָͨ�^����늙C��λ�Á팍�F���C���˵��\�ӿ��ơ����ؿ�����ָͨ�^����늙C��Ť�팍�F���C���˵��\�ӿ��ơ�늙C���D�١�λ�ú�Ť�صĿ��ƶ���ͨ�^׃�l���팍�F�ġ�׃�l�����Ԍ��F��늙Cݔ������Ŀ��ƣ��Ķ�����늙C���D�١�λ�ú�Ť�ء�
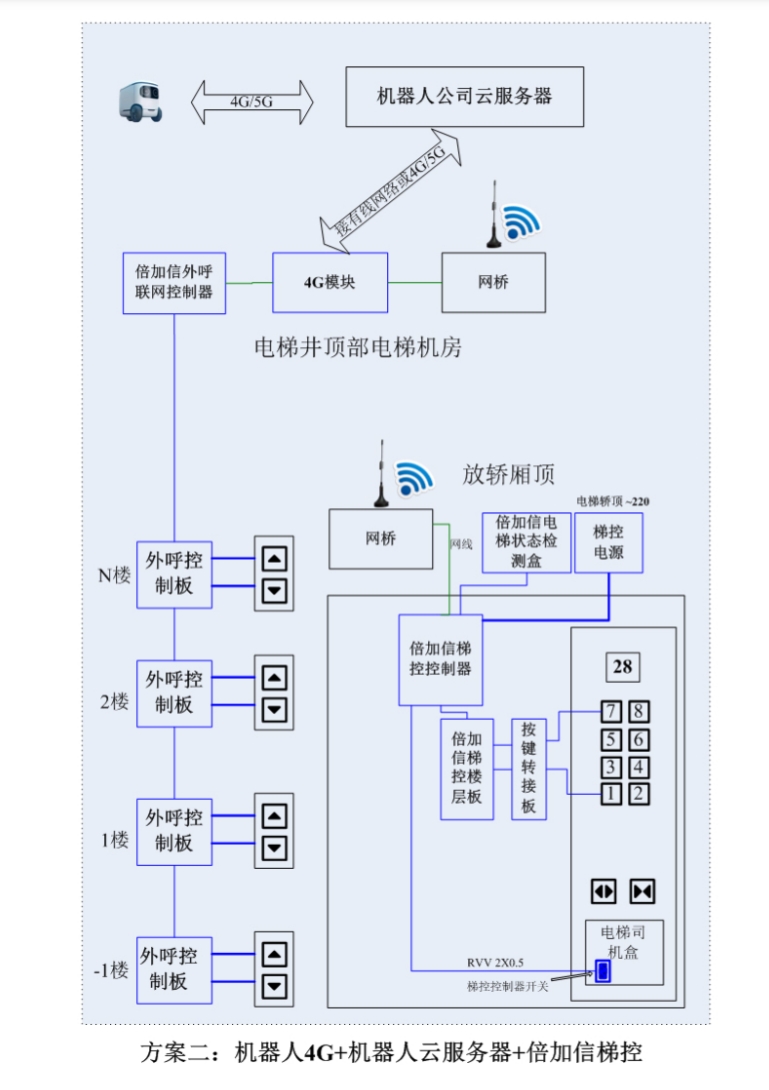
����늙C����֮�⣬�C���˳���߀��Ҫ��ӿ���ϵ�y��֧�֡���ӿ���ϵ�y��Ҫ������ӿ������Ϳ���ܛ���ɲ��֡�
��ӿ�������ָ���ƙC���˳��ݵ�����O�䡣��ӿ��������Խ��պ�̎��늙C���D�١�λ�ú�Ť����̖��������̖�D����C�����Єӵ������ӿ�����߀���Ԍ��C�����M���\����ϙz�y������ܛ����ָ�C���˳��ݵ�ܛ�������������㷨���\��Ҏ���ȡ�

�ڙC���˳����У������������������P��Ҫ�����á��C���˳�����Ҫͨ�^�����������h���M�и�֪�͙z�y�������r�{�����\�Ӡ�B���Ԍ��F��ȫ�\�С��C���˳�����Ҫ���ü����������ҕ�X�������ͳ����������ȡ�
���������������������ǙC���˳���������Ҫ�Ă�����֮һ���������������ͨ�^�l�伤���y���C�����c�������w֮�g�ľ��x���C���˳��ݿ���ͨ�^�������������֪���֮�g�ľ��x�߶ȵ���Ϣ������늙C�������l����̖�����ƙC���˵��\�Ӡ�B��
ҕ�X��������ҕ�X��������ͨ�^���h���еĈD���M�з��������_���C���˵�λ�úͷ��C���˳��ݿ���ͨ�^ҕ�X����������֪�����߅�ĉ��ڵ���Ϣ����Ӌ����C�����\�Ӡ�B��׃�����Ķ��������\�Ӡ�B��
�����������������������ǙC���˳��������ڙz�y���w���x��һ�N���������������������Ԝy�����w�c�C����֮�g�ľ��x���Ķ��_���C���˵�λ�úͷ��C���˳��ݿ���ͨ�^��������������֪�����ݺͰ���֮�g�ľ��x����Ϣ��������ӿ������l����������̖���Ķ��{���C���˵��\�Ӡ�B��
��֮���C���˳��ݵ�늿ؼ��g��һ�N�dz����M�ļ��g��ͨ�^늙C���ơ���ӿ���ϵ�y�����������Ƶ��ֶ팍�F���ڌ��F�C���˳��ݵ��^���У��҂���Ҫ��늙C���ơ���ӿ���ϵ�y�͂����������M��Ԕ���ķ������о���ֻ���@�ӣ����ܰl�]�C���˳��ݼ��g����ݣ����F��Ч����ȫ�ij����\ݔ��
���Ę˺�����B�C���˳��ݵ�늿ؼ��g����
<
- ��һƪ���C���˳�������Щ���È����� 2023/11/28
- ��һƪ���C���˳��ݵļ��g�������������� Ę �R �e���h����֪��·��Ҏ 2023/11/28