�C���������ϵ�y(t��ng)����ЩӲ���M��
2024/1/15 8:30:34�c����
�C���������ϵ�y(t��ng)����ЩӲ���M��
�C���˳���ϵ�y(t��ng)��Ӳ����Ҫ�����ײ��ֽM�ɣ�

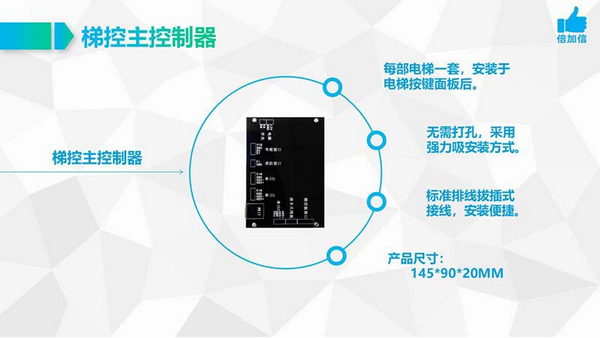
1. �ݿ��������䣺�@��ϵ�y(t��ng)��߉�Ϳ������ģ�ؓ؟̎�����е������������ϵ�y(t��ng)�����������(n��i)���������ư��ϵ�y(t��ng)�Դ����������ϵ�y(t��ng)�ṩ��Ҫ�������
2. ��݃�(n��i)�����o���ƣ��@�����O(sh��)�����(j��)����������ָ���M�Иnj��x��͘nj��_�ſ��ơ����C������Ҫ���ݕr�����l(f��)��һ����̖�c��Ҫȥ�ĘnjӰ��I��
3. ��ݘnjәz�y���@��ģ�K���ڙz�y��ݮ�ǰ�ĘnjӺ������Р�B(t��i)���Դ_���C�����܉����_�ص��_Ŀ�˘njӡ�
4. ����T��B(t��i)�z�y���@����ؓ؟�O(ji��n)�y�I���T���_�P(gu��n)��B(t��i)����ֹ�C����������Tδ��ȫ���_�r�M����x�_�I�䣬�_���䰲ȫ��

5. ͨ��ģ�K���C���˳���ϵ�y(t��ng)ͨ��ʹ��LORA/Wifi�c4G�Y(ji��)�ϵ�ͨӍ��ʽ�����F(xi��n)����ݠ�B(t��i)�ī@ȡ�͙C���˳���ָ����°l(f��)����ijЩϵ�y(t��ng)�У�߀���ܰ���IC�����S�a��(f��)���x�^����Ę�R�e�ݿص��������x���ܣ������R�e����C�����Ñ������ֺ͙�(qu��n)�ޡ�
- ��һƪ���C���˳���ϵ�y(t��ng)�İ��b�^�������ӵģ� 2024/1/15
- ��һƪ�����b�C���˳���ϵ�y(t��ng)ע����� 2024/1/15

 �����W(w��ng)���� 44030602004070̖
�����W(w��ng)���� 44030602004070̖